Descripcion detallada del proyecto
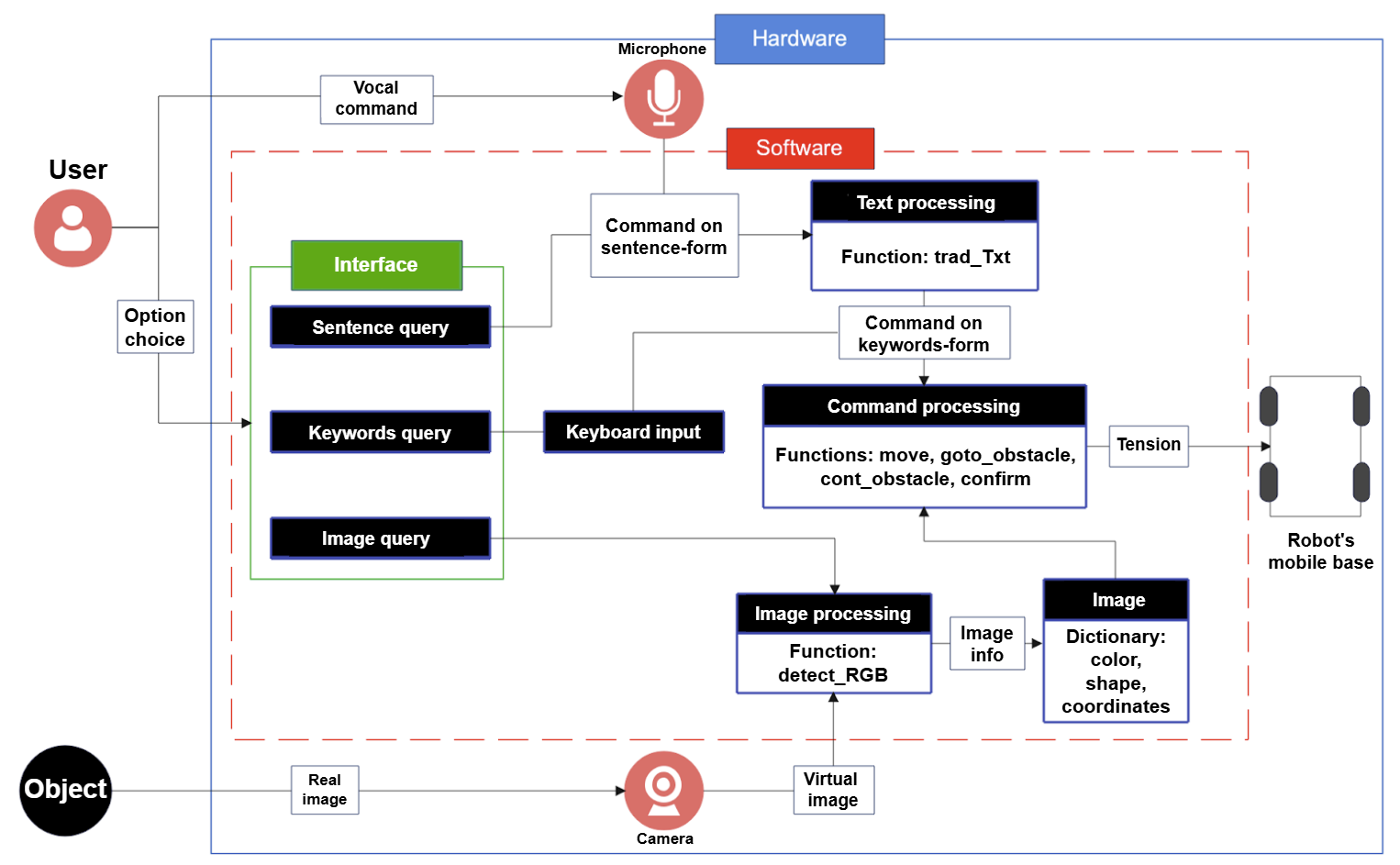
Este proyecto se centra en el desarrollo de un robot virtual capaz de analizar imágenes para detectar objetos, comprender comandos de texto en varios idiomas y simular movimientos en función de dichas instrucciones.
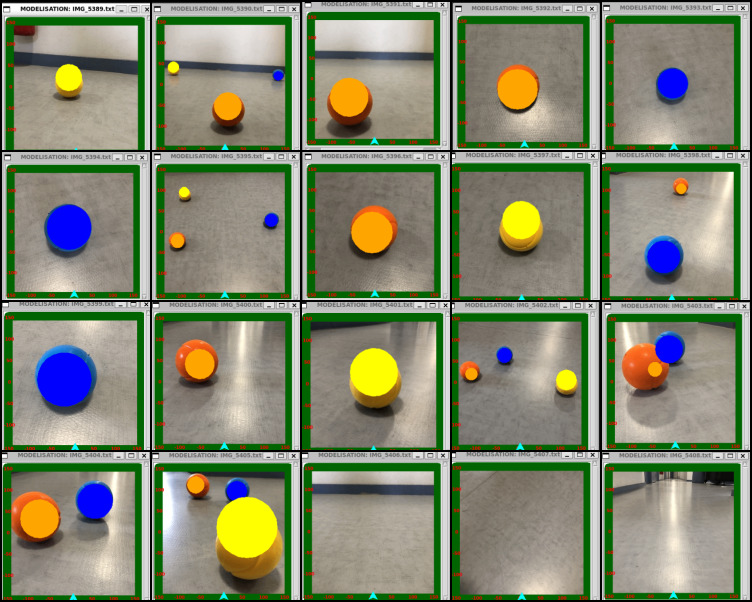
Procesa imágenes de entrada detectando bolas de diferentes colores y devuelve las coordenadas de su centro, su color, su diametro y su centro
Procesa ordenes vocales de los usuarios que pueden emitir tanto en francés como en español.
Simula con Turtle los movimientos del robot en un entorno real, basandose en la imagen y ordenes de entrada
Esta fase es una base preparatoria para su implementación en un robot físico en el futuro.
Utilizacion
- 1- git clone https://github.com/IsmaTIBU/MobotSim
- 2- cd mobot
- 3- make (para compilar el proyecto)
- 4- ./main (para ejecutar lo)
Logros alcanzados
- Sistema de comandos de voz clasificado como el mejor de la promocion por el jurado compuesto por profesionales en este dominio en particular.
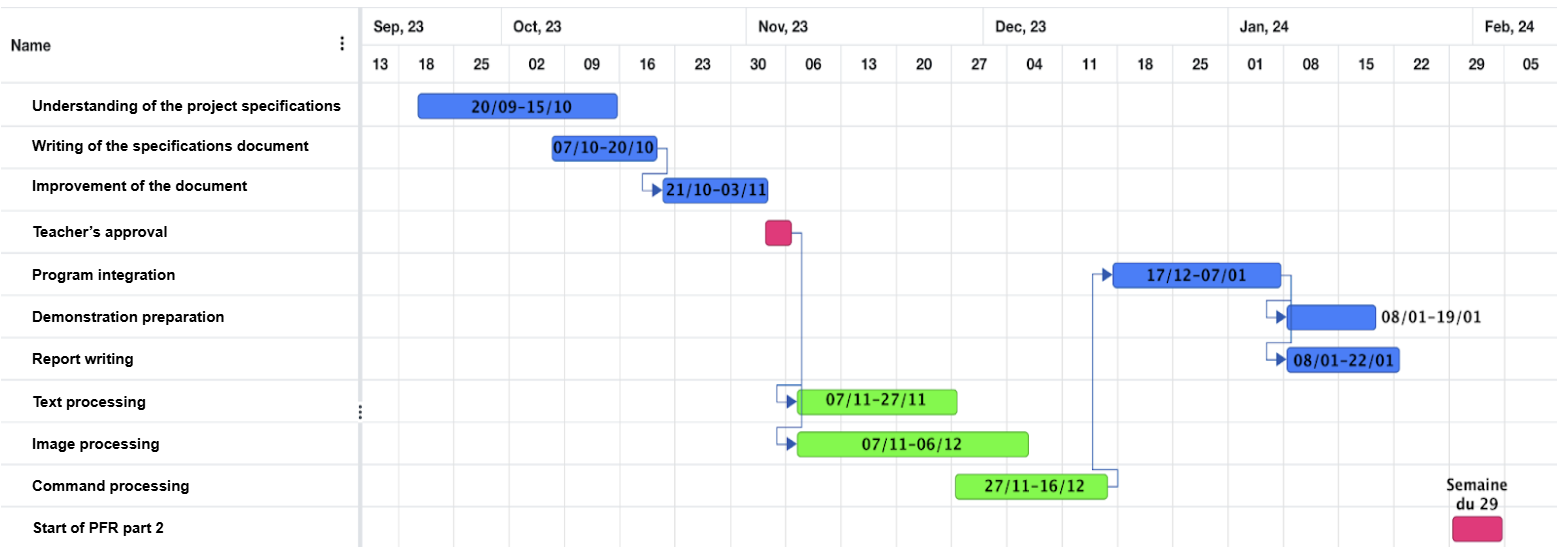
- Reconocidos por ser los unicos en cumplir rigurosamente los tiempos de entrega establecidos en cada fase del proyectoDetección de múltiples objetos con un 90% de precisión en diámetro/posición
- Sistema de comandos adaptable a frases complejas y unidades variables
- Simulación fluida con retroalimentación visual, validando la lógica para futura implementación en hardware real