Ismael Monge Rouchdi
Estudiante de Master en Robotica e Inteligencia Artificial
En busca de practicas en el campo de la inteligencia artificial aplicada a la industria.

En busca de practicas en el campo de la inteligencia artificial aplicada a la industria.
Aunque la tecnología y la innovación son una parte central de mi vida —y me llevaron a estudiar robótica e inteligencia artificial—, nunca me he definido solo por ello. El deporte ha sido una constante que me ha enseñado disciplina y constancia, y mi pasión por los perfumes refleja cómo también valoro los pequeños detalles que dicen mucho de una persona. Me gusta explorar distintos ámbitos y construir mi identidad desde esa diversidad.



Finalizacion estimada para 2026




Este proyecto es un modelo integral de robot RRR, que incluye parámetros de modelado, simulaciones y pruebas asociadas. Permite realizar cálculos de modelado geométrico y cinemático, así como simulaciones de trayectorias.

MoBot es un robot móvil capaz de recibir instrucciones por voz, procesarlas mediante inteligencia artificial y ejecutarlas de forma autónoma, integrando visión por computador en tiempo real y un sistema de navegación basado en Arduino.

MoBotSim es una plataforma de simulación para un robot móvil que combina análisis de imágenes, interpretación de comandos en lenguaje natural y simulación de movimientos en un entorno virtual.
¿Quieres ver más de mi trabajo?
Para ver el resto de mis proyectos visita mi GitHub
Miembro del equipo de Driverless, mas concretamente en la seccion de vision por ordenador durante el periodo 2024-2025.
Ascendido a Scrum Master para la temporada 2025-2026.
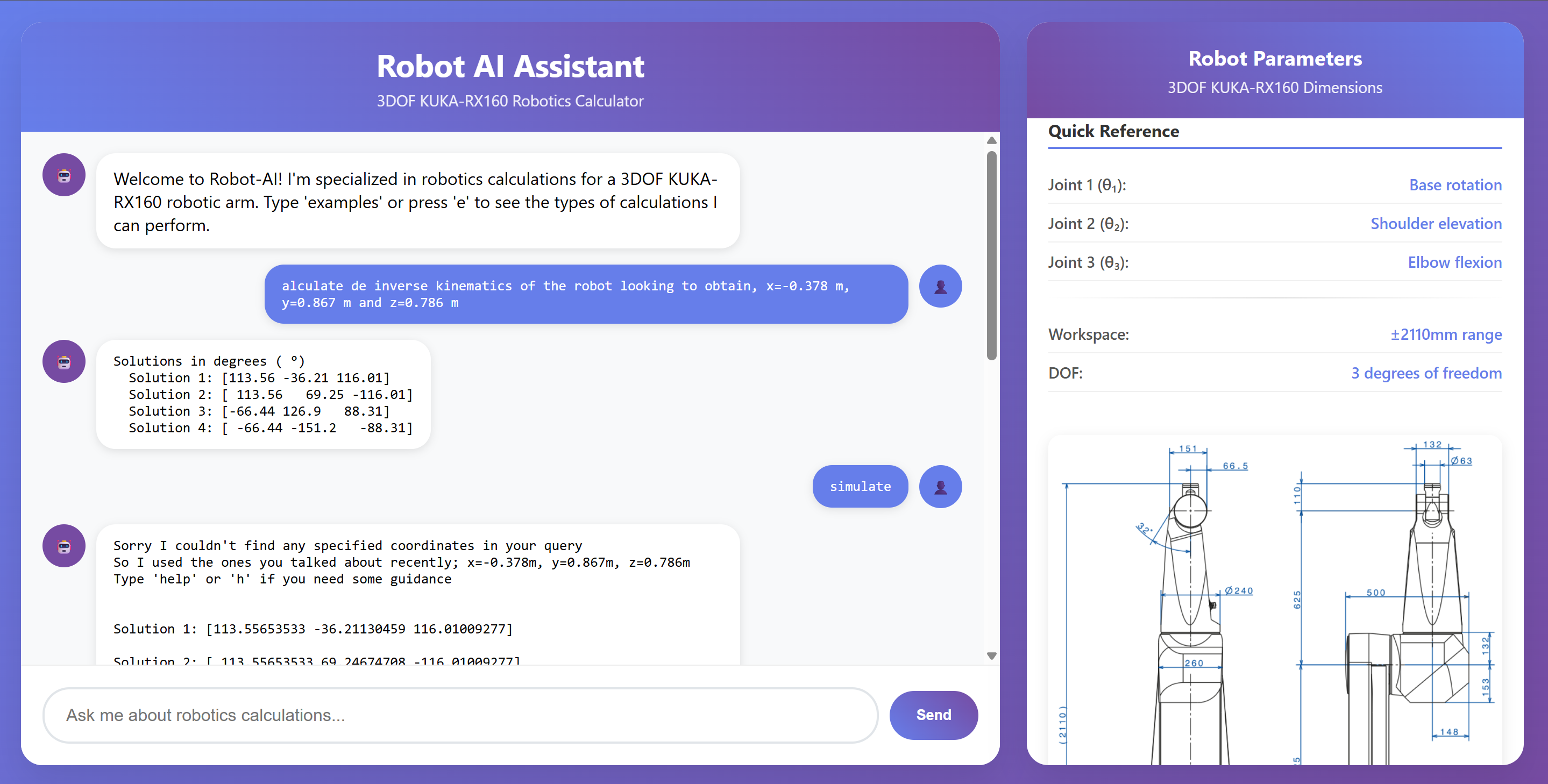
Modelo de inteligencia artificial especializado en cálculos de robótica para un brazo robótico KUKA-RX160 de 3 grados de libertad.

Proyecto de practicas en "Kepar electronics", consistiendo en la programacion de un robot colaborativo con el objetivo de ser capaz de despaletizar 2 cajas recambiables.
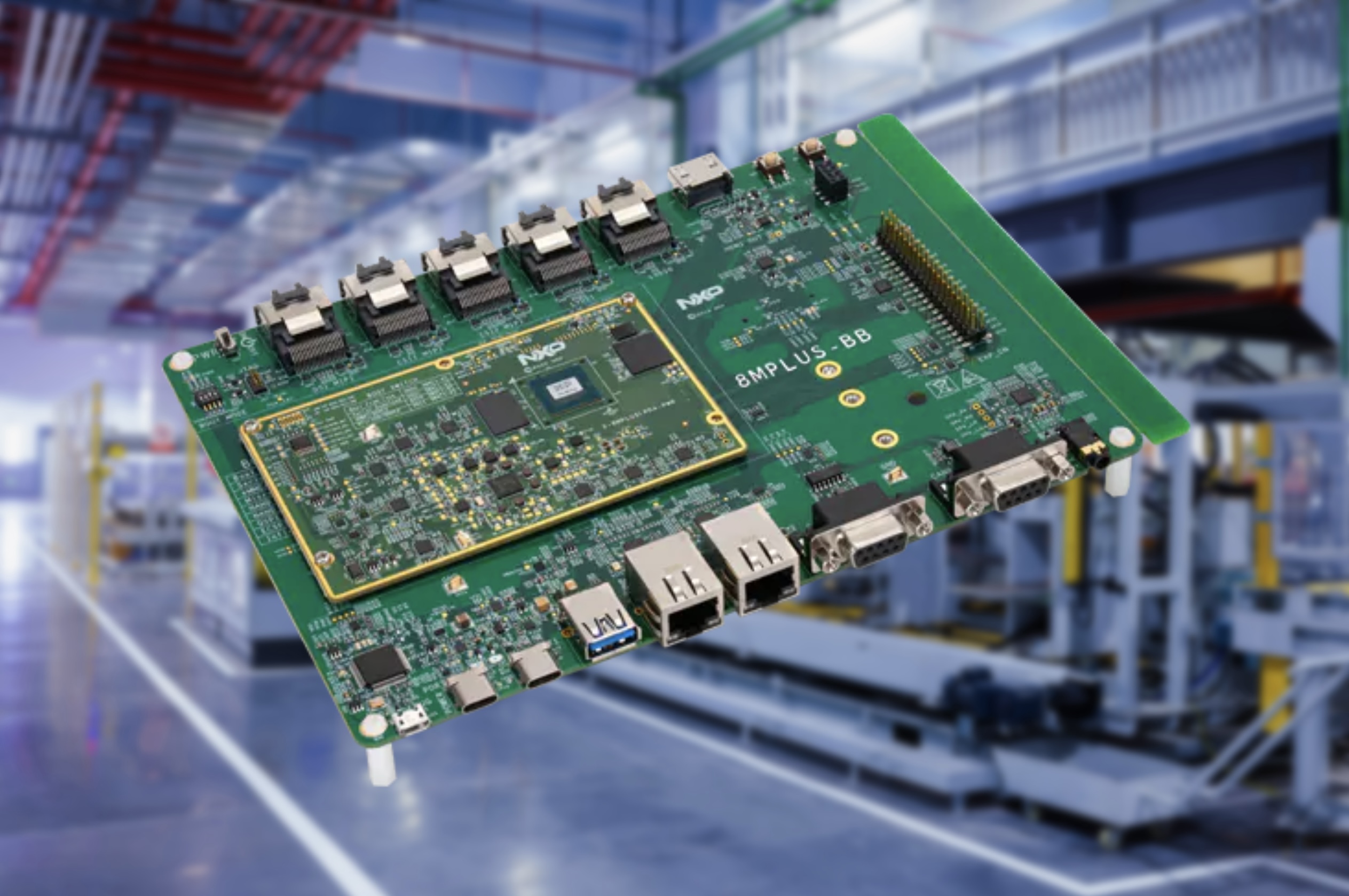
Proyecto de practicas en "Kepar electronica", consistiendo en el diseño e integracion de un modelo de clasificacion de imagenes en una placa electronica 8MPLUS-BB de NXP.