Detailed project description
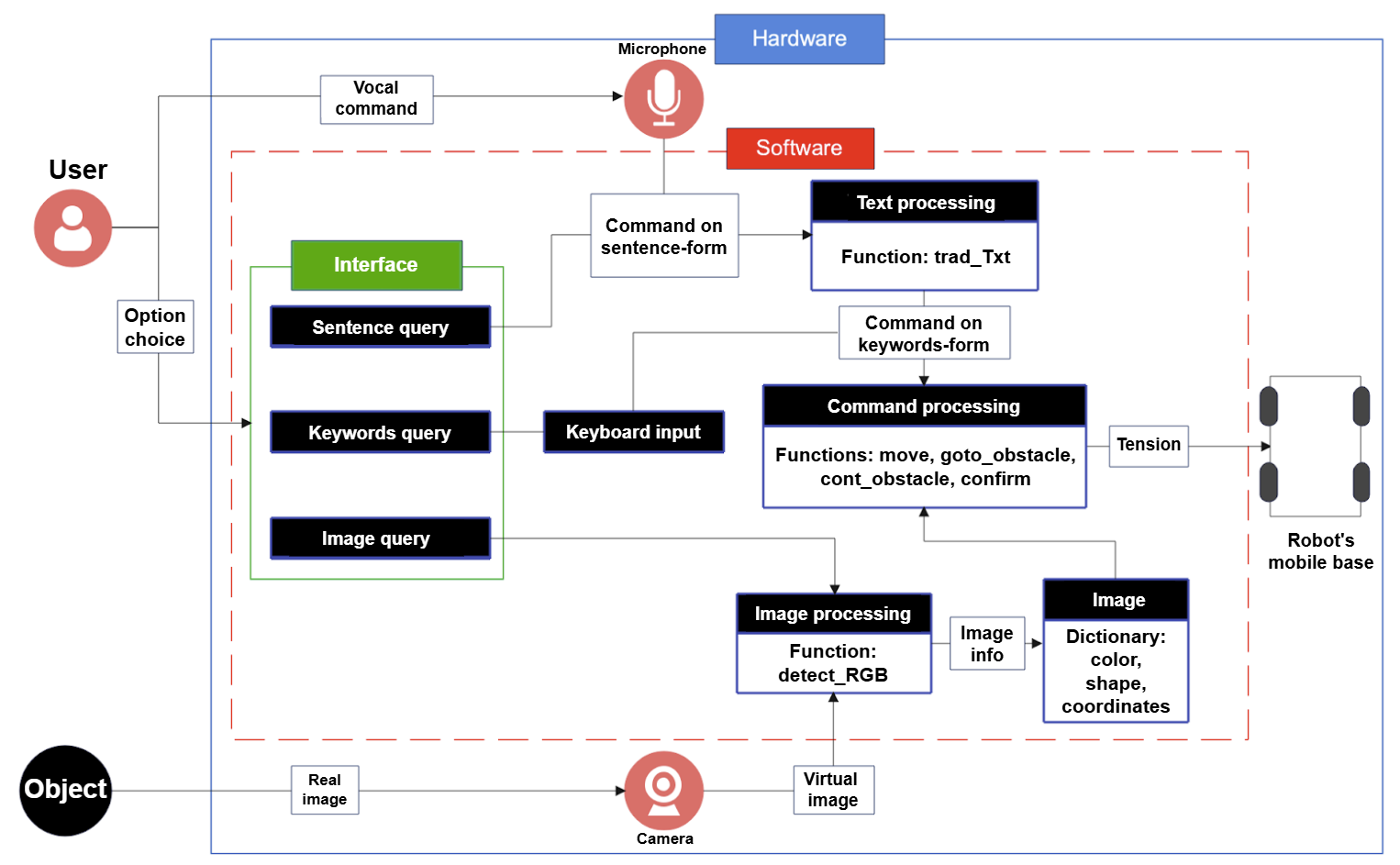
This project focuses on developing a virtual robot capable of analyzing images to detect objects, understanding text commands in multiple languages and simulating movements based on such instructions.
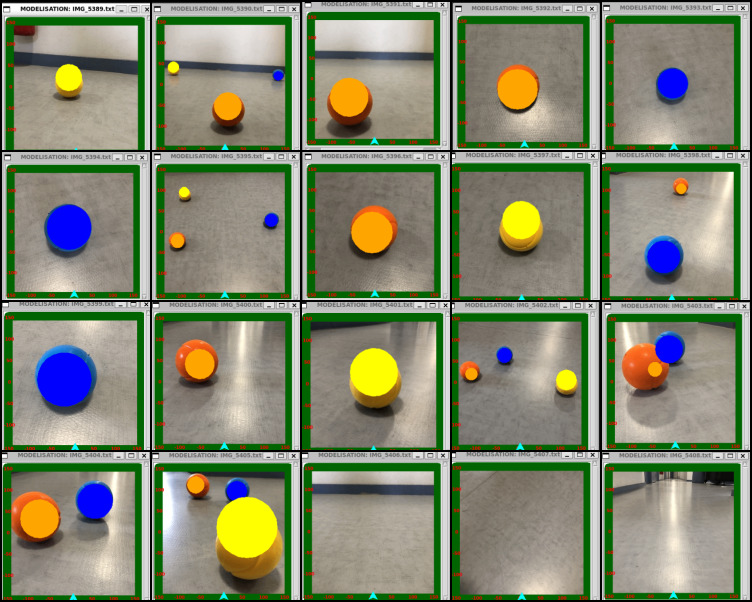
Processes images by detecting balls of different colors and returns the coordinates of their center, their color, their diameter and their center
Processes voice commands from users who can issue them in both French and Spanish.
Simulates with Turtle the robot's movements in a real environment, based on input image and commands
This phase is a preparatory base for its implementation in a physical robot in the future.
Usage
- 1- git clone https://github.com/IsmaTIBU/MobotSim
- 2- cd mobot
- 3- make (to compile the project)
- 4- ./main (to execute it)
Achievements
- Voice command system classified as the best of the class by a jury composed of professionals in this particular domain.
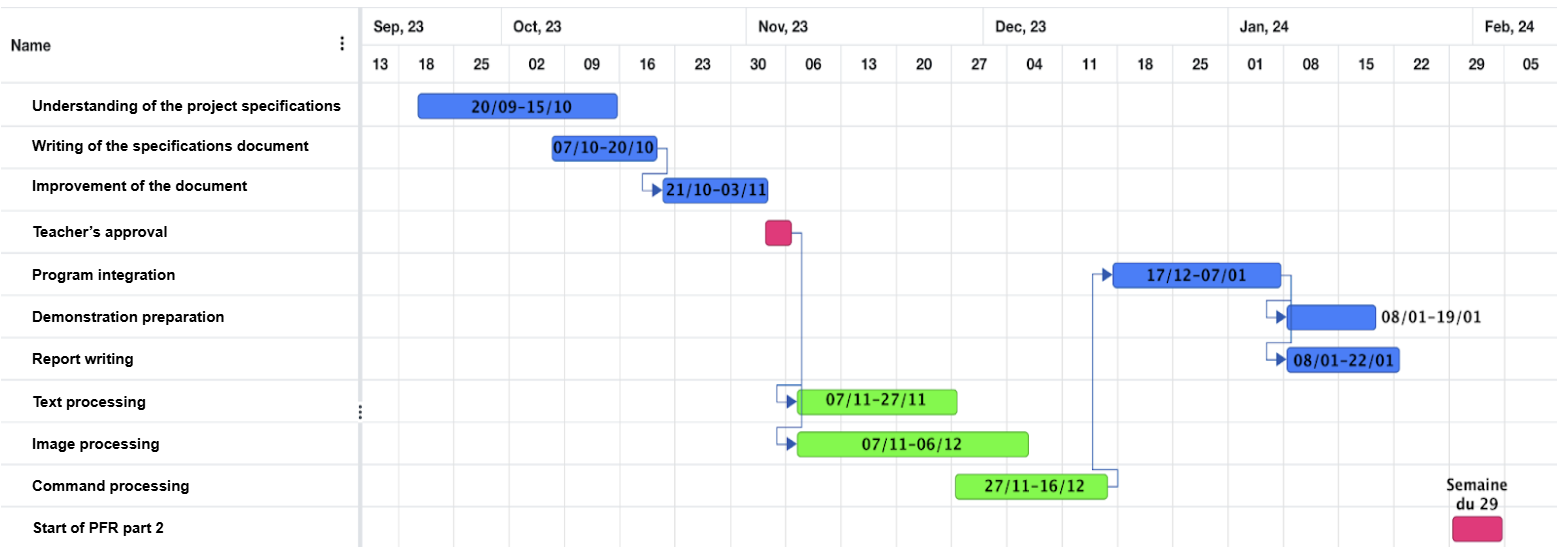
- Recognized for being the only ones to rigorously meet the delivery times established in each phase of the project
- Detection of multiple objects with 90% accuracy in diameter/position
- Command system adaptable to complex phrases and variable units
- Smooth simulation with visual feedback, validating logic for future implementation in real hardware