Ismael Monge Rouchdi
Étudiant en Master de Robotique et Intelligence Artificielle
À la recherche de stages dans le domaine de l'intelligence artificielle appliquée à l'industrie.

À la recherche de stages dans le domaine de l'intelligence artificielle appliquée à l'industrie.
Bien que la technologie et l'innovation soient une partie centrale de ma vie —et m'aient mené à étudier la robotique et l'intelligence artificielle—, je ne me suis jamais défini uniquement par cela. Le sport a été une constante qui m'a enseigné la discipline et la persévérance, et ma passion pour les parfums reflète comment je valorise aussi les petits détails qui en disent long sur une personne. J'aime explorer différents domaines et construire mon identité à partir de cette diversité.



Finalisation estimée pour 2026




Ce projet est un modèle intégral de robot RRR, qui inclut des paramètres de modélisation, des simulations et des tests associés. Il permet de réaliser des calculs de modélisation géométrique et cinématique ainsi que des simulations de trajectoires.

MoBot est un robot mobile capable de recevoir des instructions vocales, de les traiter par intelligence artificielle et de les exécuter de façon autonome, intégrant la vision par ordinateur en temps réel et un système de navigation basé sur Arduino.

MoBotSim est une plateforme de simulation pour un robot mobile qui combine l'analyse d'images, l'interprétation de commandes en langage naturel et la simulation de mouvements dans un environnement virtuel.
Vous voulez voir plus de mon travail?
Pour découvrir le reste de mes projets, visitez mon GitHub
Membre de l'équipe Driverless, plus concrètement dans la section de vision par ordinateur pendant la période 2024-2025.
Promu Scrum Master pour la saison 2025-2026.
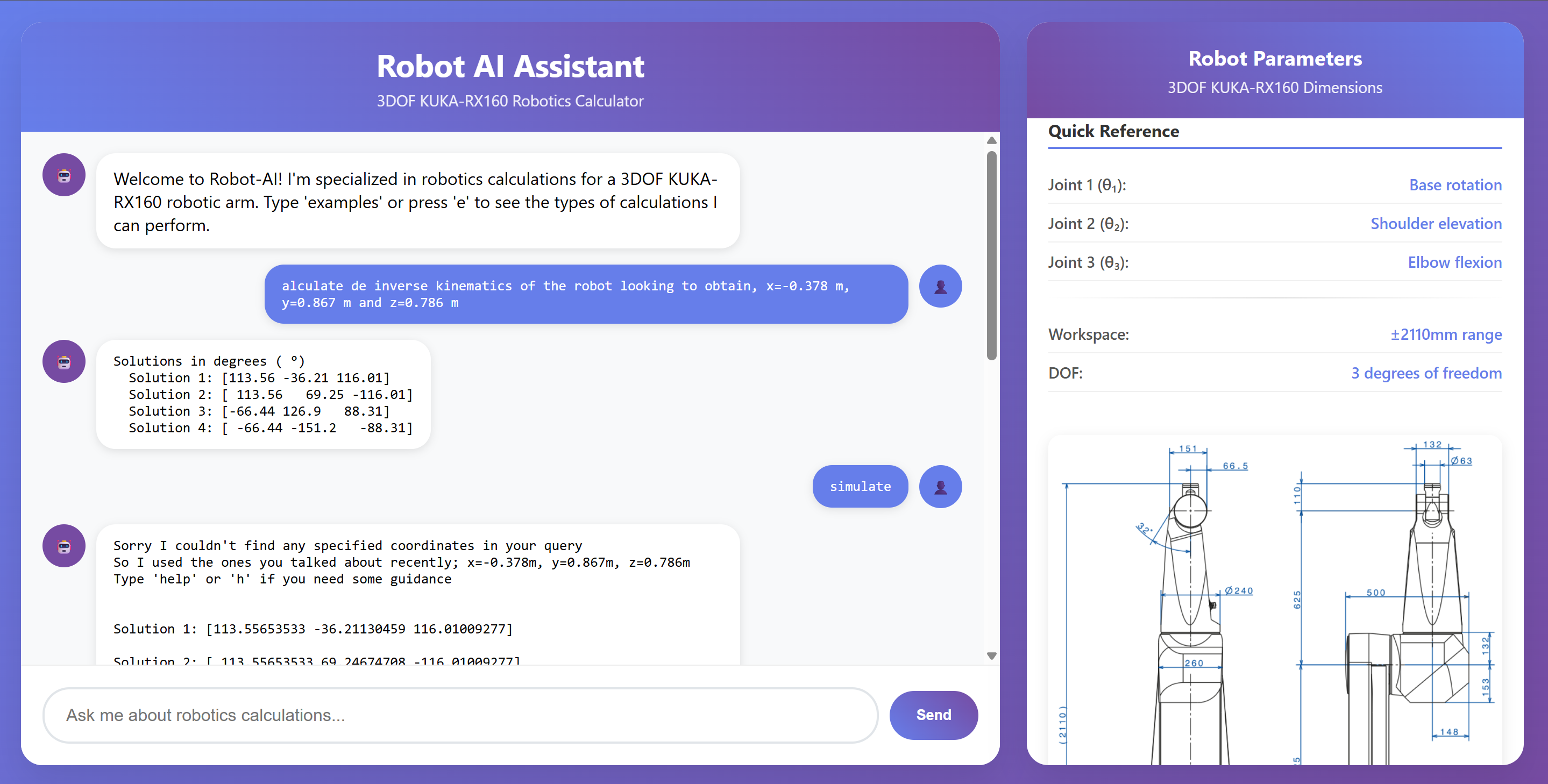
Modèle d'intelligence artificielle spécialisé dans les calculs de robotique pour un bras robotique KUKA-RX160 à 3 degrés de liberté.

Projet de stage chez "Kepar electronics", consistant en la programmation d'un robot collaboratif avec l'objectif d'être capable de dépalettiser 2 caisses échangeables.
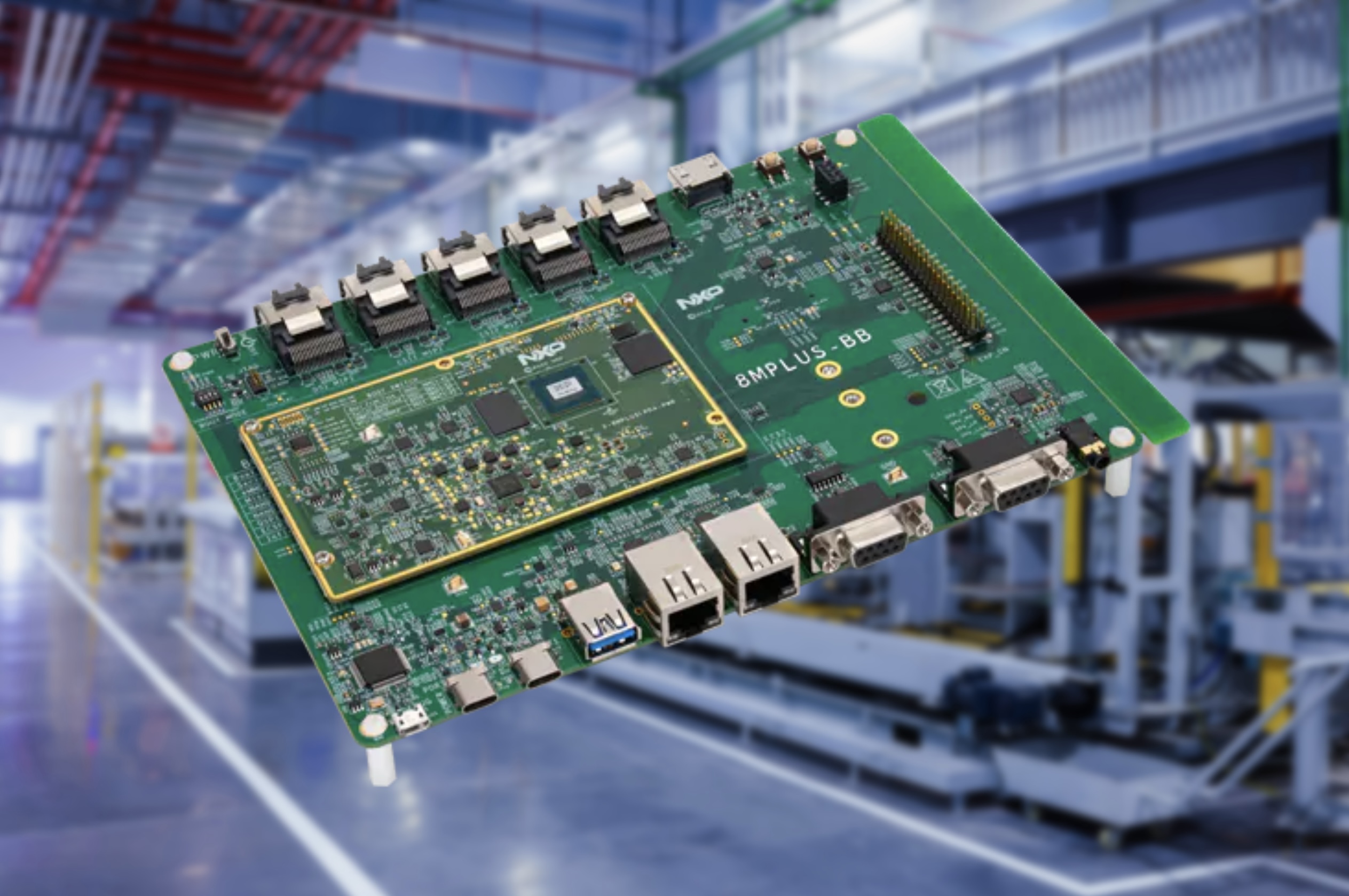
Projet de stage chez "Kepar electronics", consistant en la conception et l'intégration d'un modèle de classification d'images dans une carte électronique 8MPLUS-BB de NXP.